本文共 1097 字,大约阅读时间需要 3 分钟。
CAN协议和标准规范
1 由ISO标准化的CAN协议
CAN协议已经由ISO标准化,有2个版本,如ISO11898和ISO11519-2,它们之间在数据链路层没什么不同,但是在物理层有些区别。
(1) 关于ISO11898:这个标准用于高速CAN通讯。开始的时候,数据链路层和物理层都在标准ISO11898中规定,后来被拆分为ISO11898-1(仅涉及数据链路层)和ISO11898-2(仅涉及物理层)
(2) 关于ISO11519:这个标准用于低速(最高125kbps)CAN通讯
2 ISO11898和ISO11519-2之间的不同
图6显示了CAN规范的规定范围。三个物理层的子层:PLS(Physucal Signaling Sublayer物理信号子层)子层,PMA(Physical Medium Attachment物理介质连接)子层,MDI(Medium Dependent Interface介质相关接口)子层,PMA和MDI子层的定义是不一样的。
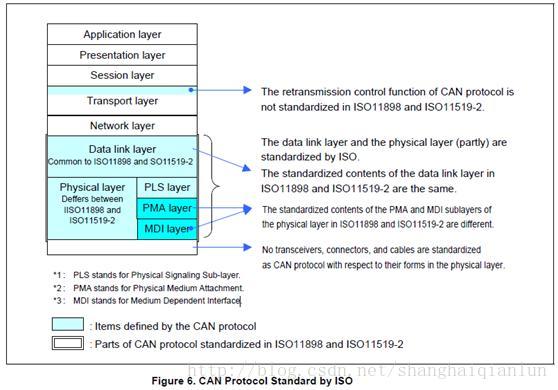
表3列出了ISO11898和ISO11519-2之间的物理层上的不同,图7现实了通讯速度和总线长度之间的关系。
通讯速度和总线长度需要由用户按照系统要求进行设置。

总线拓扑:
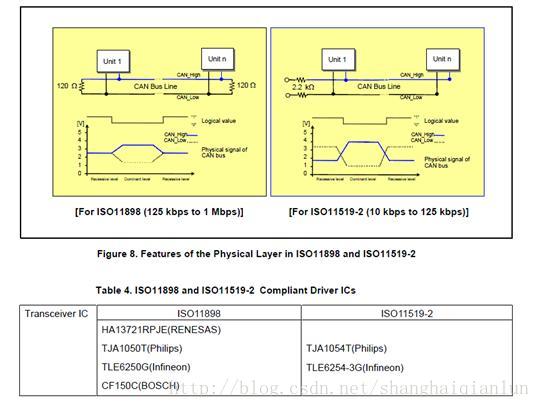
CAN总线通常有2根线(CAN_High和CAN_Low)组成,CAN控制器通过一个收发器连接到总线上,总线的电平由CAN_High和CAN_Low的电位差来确定,总线有2个电平:显性和隐性,在任一给定的时间内,总线总是处于这2个电平之一。对于逻辑上“线与”的总线,显性和隐性电平被看作逻辑0和逻辑1,一个发送单元能够通过改变总线电平来送一个信息给接收单元。
ISO11898和ISO11519-2规定的物理层终端阻抗、显性电平、隐性电平差分电压是不同的。
图8显示了ISO11898和ISO11519-2物理层的特点,注意ISO11898和ISO11519-2要求一个收发器满足对应的标准,表4列出了满足ISO11898和ISO11519-2的主要收发器IC。
3 CAN和标准规范
除了ISO,CAN规范由工业标准组织如SAE标准化,以及由一些私立研究机构和公司进行了标准化。
表5类除了一些基本的标准规范,图9显示了通讯协议用于汽车按照通讯速度分级
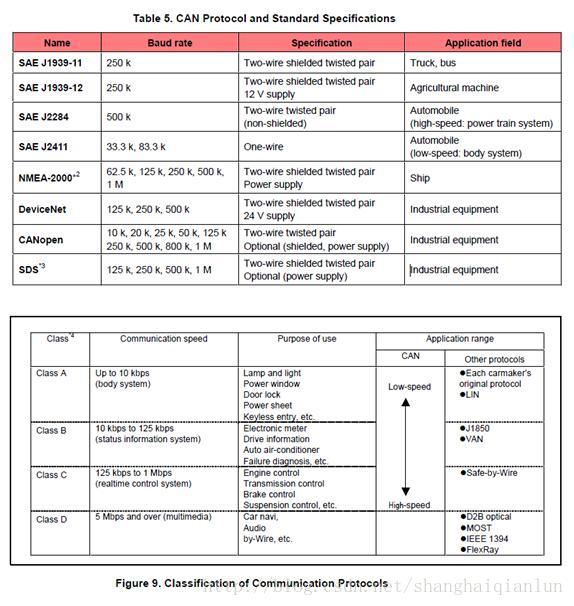
SAE:代表汽车工程师协会(Societyof Automotive Engineers)
NMEA:代表国家海洋教育者协会(NationalEducators Association)
SDS:代表智能分布系统(SmartDistributed System)
Class:SAE的分类名称